


Biomedical robot (Micro/Nano- and Meso- scale)
Sub-millimeter fiberscopic robot with integrated maneuvering, imaging, and biomedical operation abilities
Small-scale continuum robots hold promise for interventional diagnosis and treatment, yet existing models struggle to achieve small size, precise steering, and visualized functional treatment simultaneously, termed an “impossible trinity”. This study introduces an optical fiber-based continuum robot integrated imaging, high-precision motion, and multifunctional operation abilities at submillimeter-scale. With a slim profile of 0.95 mm achieved by microscale 3D printing and magnetic spray, this continuum robot delivers competitive imaging performance and extends obstacle detection distance up to ~9.4 mm, a tenfold improvement from the theoretical limits. Besides, the robot showcases remarkable motion precision (less than 30 μm) and substantially widens the imaging region by ~25 times the inherent view. Through ex vivo trials, we validate the robot’s practicality in navigating constrained channels, such as the lung end bronchus, and executing multifunctional operations including sampling, drug delivery, and laser ablation. The proposed submillimeter continuum robot marks a significant advancement in developing biomedical robots, unlocking numerous potential applications in biomedical engineering. Nature Communications, 15, 10874 (2024). [Editors’ Highlights: one of the 50 best papers recently published in the area of “Devices”]
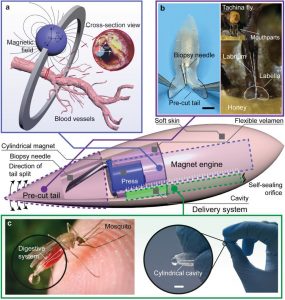
Nanofiber-based biodegradable millirobot with controllable anchoring and adaptive stepwise release functions
A millirobot that can work in the alimentary tract is of great interest for future biomedical treatments, but challenges remain for the robot in the integration of multiple drugs, effective locomotion under the harsh in-body environment, controllable anchoring on the desired area, and adaptive stepwise release. Here, we report a nanofiber-based biodegradable millirobot, named Fibot, fabricated by integrating magnetic-assisted molding and electrospin-assisted assembling. By adjusting the material components of Fibot during fabrication, we can program the adaptive release of different drugs responding to variations in acidic physiological concentrations. Moreover, the multi-legged design gives it an effective locomotive ability even in the harsh in-body environment. We demonstrate locomotion abilities in the GI tract, desired-region anchoring, and multiple-drug stepwise release in a rabbit model. This research will shed new light on millirobot development and promote the realization of untethered, biodegradable, functional, and environmental adaptive devices to be implemented in various biomedical applications. Matter, 5, 1277-1295 (2022).
An agglutinate magnetic spray transforms inanimate objects into millirobots for biomedical applications
Millirobots that can adapt to unstructured environments, operate in confined spaces, and interact with a diverse range of objects would be desirable for exploration and biomedical applications. The continued development of millirobots, however, requires simple and scalable fabrication techniques. Here, we propose a minimalist approach to construct millirobots by coating inanimate objects with a composited agglutinate magnetic spray. Our approach enables a variety of one-dimensional (1D), 2D, or 3D objects to be covered with a thin magnetically drivable film (~100 to 250 micrometers in thickness). The film is thin enough to preserve the original size, morphology, and structure of the objects while providing actuation of up to hundreds of times its own weight. Under the actuation of a magnetic field, our millirobots are able to demonstrate a range of locomotive abilities: crawling, walking, and rolling. Moreover, we can reprogram and disintegrate the magnetic film on our millirobots on demand. We leverage these abilities to demonstrate biomedical applications, including catheter navigation and drug delivery. Science Robotics, 5, eabc8191 (2020).
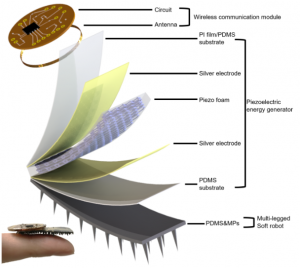
A bioinspired multilegged soft millirobot that functions in both dry and wet conditions
Developing untethered millirobots that can adapt to harsh environments with high locomotion efficiency is of interest for emerging applications in various industrial and biomedical settings. Despite recent success in exploiting soft materials to impart sophisticated functions which are not available in conventional rigid robotics, it remains challenging to achieve superior performances in both wet and dry conditions. Inspired by the flexible, soft, and elastic leg/foot structures of many living organisms, here we report an untethered soft millirobot decorated with multiple tapered soft feet architecture. Such robot design yields superior adaptivity to various harsh environments with ultrafast locomotion speed (>40 limb length/s), ultra-strong carrying capacity (>100 own weight), and excellent obstacle-crossing ability (stand up 90° and across obstacle >10 body height). Our work represents an important advance in the emerging area of bio-inspired robotics and will find a wide spectrum of applications. Nature Communications, 9, 3944 (2018).
Functionalized spiral‐rolling millirobot for upstream swimming in blood vessel [More details]
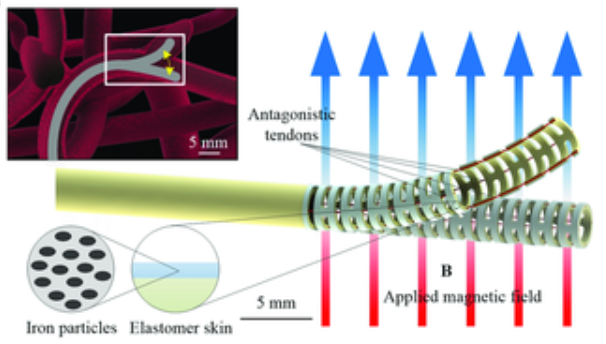
Millimeter-Scale Soft Continuum Robots for Large-Angle and High-Precision Manipulation by Hybrid Actuation [More details]
Battery‐less soft millirobot that can move, sense, and communicate [More details]
AI-enhanced human-robot interaction (Macro- scale)
A Soft Tactile Unit with 3D Force and Temperature Mathematical Decoupling Ability for Robots
The human skin exhibits remarkable capability to perceive contact forces and environmental temperatures, providing intricate information essential for nuanced manipulation. Despite recent advancements in soft tactile sensors, a significant challenge remains in accurately decoupling signals – specifically, separating force from directional orientation and temperature – resulting in fail to meet the advanced application requirements of robots. This research proposes a multi-layered soft sensor unit (F3T) designed to achieve isolated measurements and mathematical decoupling of normal pressure, omnidirectional tangential forces, and temperature. We developed a circular coaxial magnetic film featuring a floating-mountain multi-layer capacitor, facilitating the physical decoupling of normal and tangential forces in all directions. Additionally, we incorporated an ion gel-based temperature sensing film atop the tactile sensor. This sensor is resilient to external pressure and deformation, enabling it to measure temperature and, crucially, eliminate capacitor errors induced by environmental temperature changes. This innovative design allows for the decoupled measurement of multiple signals, paving the way for advancements in higher-level robot motion control, autonomous decision-making, and task planning. Engineering, (2025).
Digital channel-enabled distributed force decoding via small datasets for hand-centric interactions
Tactile interfaces are essential for enhancing human-machine interactions, yet achieving large-scale, precise distributed force sensing remains challenging due to signal coupling and inefficient data processing. Inspired by the spiral structure of Aloe polyphylla and the processing principles of neuronal systems, this study presents a digital channel–enabled distributed force decoding strategy, resulting in a phygital tactile sensing system named PhyTac. This innovative system effectively prevents marker overlap and accurately identifies multipoint stimuli up to 368 regions from coupled signals. By integrating physics into model training, we reduce the dataset size to just 45 kilobytes, surpassing conventional methods that typically exceed 1 gigabyte. Results demonstrate PhyTac’s impressive fidelity of 97.7% across a sensing range of 0.5 to 25 newtons, enabling diverse applications in medical evaluation, sports training, virtual reality, and robotics. This research not only enhances our understanding of hand-centric actions but also highlights the convergence of physical and digital realms, paving the way for advancements in AI-based sensor technologies. Science Advances, 11, eadt2641 (2025).
A liquid metal-based module emulating the intelligent preying logic of flytrap
Plant species like the Venus flytrap possess unique abilities to intelligently respond to various external stimuli, ensuring successful prey capture. Their nerve-devoided structure provides valuable insights for exploring natural intelligence and constructing intelligent systems solely from materials, but limited knowledge is currently available and the engineering realization of such concept remains a significant challenge. Drawing upon the flytrap’s action potential resulting from ion diffusion, we propose a signal accumulation/attenuation model and a corresponding liquid metal-based logic module, which operates on the basis of the shape change of liquid metal within a sodium hydroxide buffer solution. The module itself exhibits memory and counting properties without involving any other electronic components, intelligently responding to various stimulus sequences, and reproducing the flytrap’s most logical function. We also demonstrate and forecast its potential as a moving window integration-based high-pass filter, artificial synapse in neural networks, and other related applications. This research provides a fresh perspective on comprehending the intelligence inherent in nature and its realization through physical structures, which is expected to inspire logic device development in a broad engineering field. Nature Communications, 15, 4761 (2024).
Soft magnetic skin for super-resolution tactile sensing with force self-decoupling
Human skin can sense subtle changes of both normal and shear forces and perceive stimuli with finer resolution than the average spacing between mechanoreceptors. By contrast, existing tactile sensors for robotic applications are inferior, lacking accurate force decoupling and proper spatial resolution at the same time. Here, we present a soft tactile sensor with self-decoupling and super-resolution abilities by designing a sinusoidally magnetized flexible film (with the thickness ~0.5 millimeters), whose deformation can be detected by a Hall sensor according to the change of magnetic flux densities under external forces. The sensor can accurately measure the normal force and the shear force (demonstrated in one dimension) with a single unit and achieve a 60-fold super-resolved accuracy enhanced by deep learning. By mounting our sensor at the fingertip of a robotic gripper, we show that robots can accomplish challenging tasks such as stably grasping fragile objects under external disturbance and threading a needle via teleoperation. This research provides new insight into tactile sensor design and could be beneficial to various applications in robotics field, such as adaptive grasping, dexterous manipulation, and human-robot interaction. Science Robotics, 6, eabc8801 (2021).
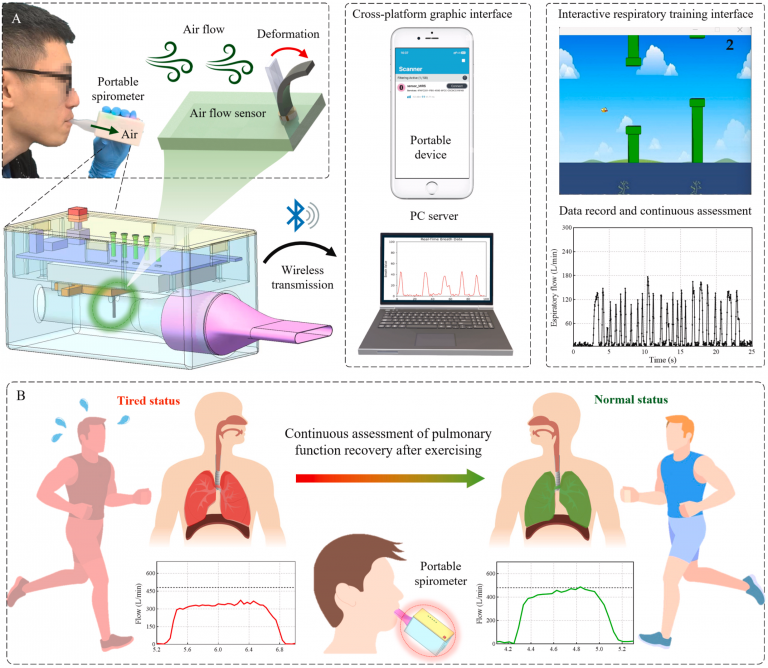
A portable wireless spirometer device for long-term pulmonary function monitoring and training [More details]
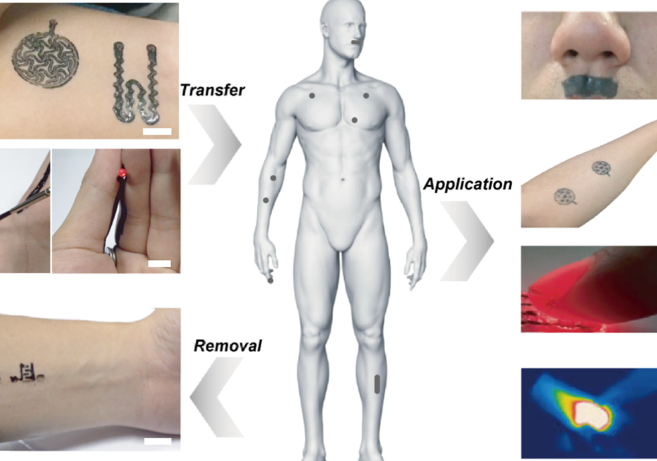
Natural gum-based electronic ink with water-proofing self-healing and easy-cleaning properties for directly on-skin electronics [More details]

A MEMS resonant accelerometer for low-frequency vibration detection [More details]
Foundational Inquiry and Interdisciplinary Exploration
One-step formation of polymorphous sperm-like microswimmers by vortex turbulence-assisted microfluidics
Microswimmers are considered promising candidates for active cargo delivery to benefit a wide spectrum of biomedical applications. Yet, big challenges still remain in designing the microswimmers with effective propelling, desirable loading and adaptive releasing abilities all in one. Inspired by the morphology and biofunction of spermatozoa, we report a one-step formation strategy of polymorphous sperm-like magnetic microswimmers (PSMs) by developing a vortex turbulence-assisted microfluidics (VTAM) platform. The fabricated PSM is biodegradable with a core-shell head and flexible tail, and their morphology can be adjusted by vortex flow rotation speed and calcium chloride solution concentration. Benefiting from the sperm-like design, our PSM exhibits both effective motion ability under remote mag/netic actuation and protective encapsulation ability for material loading. Further, it can also realize the stable sustain release after alginate-chitosan-alginate (ACA) layer coating modification. This research proposes and verifies a new strategy for the sperm-like microswimmer construction, offering an alternative solution for the target delivery of diverse drugs and biologics for future biomedical treatment. Moreover, the proposed VTAM could also be a general method for other sophisticated polymorphous structures fabrication that isn’t achievable by conventional laminar flow. Nature Communications, 15, 4761 (2024). [Editors’ Highlights: one of the 50 best papers recently published in the area of “Applied physics and mathematics”]
Milli-scale cellular robots that can reconfigure morphologies and behaviors simultaneously
Modular robot that can reconfigure architectures and functions has advantages in unpredicted environment and task. However, the construction of modular robot at small-scale remains a challenge since the lack of reliable docking and detaching strategies. Here we report the concept of milli-scale cellular robot (mCEBOT) achieved by the heterogeneous assembly of two types of units (short and long units). Under the magnetic field, the proposed mCEBOT units can not only selectively assemble (e.g., end-by-end and side-by-side) into diverse morphologies corresponding to the unstructured environments, but also configure multi-modes motion behaviors (e.g., slipping, rolling, walking and climbing) based on the on-site task requirements. We demonstrate its adaptive mobility from narrow space to high barrier to wetting surface, and its potential applications in hanging target taking and environment exploration. The concept of mCEBOT offers new opportunities for robot design, and will broaden the field of modular robot in both miniaturization and functionalization. Nature Communications, 13, 4156 (2022).
Self-adaptive propulsion of Ray sperms at different viscosities enabled by heterogeneous dual helixes
We disclose a peculiar rotational propulsion mechanism of Ray sperms enabled by its unusual heterogeneous dual helixes with a rigid spiral head and a soft tail, named Heterogeneous Dual Helixes (HDH) model for short. Different from the conventional beating propulsion of sperm, the propulsion of Ray sperms is from both the rotational motion of the soft helical tail and the rigid spiral head. Such heterogeneous dual helical propulsion style provides the Ray sperm with high adaptability in viscous solutions along with advantages in linearity, straightness, and bidirectional motion. This HDH model is further corroborated by a miniature swimming robot actuated via a rigid spiral head and a soft tail, which demonstrates similar superiorities over conventional ones in terms of adaptability and efficiency under the same power input. Such findings expand our knowledge on microorganisms’ motion, motivate further studies on natural fertilization, and inspire engineering designs. PNAS, 118, e2024329118 (2021).
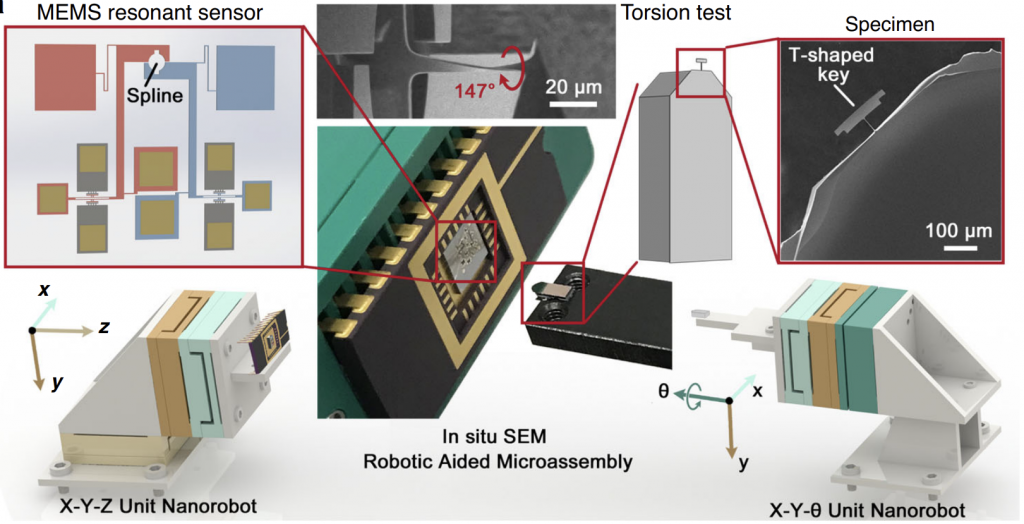
Ultrahigh-precision rotational positioning under a microscope [More details]
Magnetic Artificial Cilia Carpets for Transport, Mixing, and Directional Diffusion [More details]